


上海交大团队创立、已在智元机器人落地,触觉感知公司获数千万元融资|硬氪首发
 全球首个触觉仿真工具及多模态高精度触觉传感器。
全球首个触觉仿真工具及多模态高精度触觉传感器。作者|黄楠
编辑|袁斯来
硬氪获悉,千觉机器人科技 (上海) 有限公司(以下简称「千觉机器人」)近日完成数千万元融资,最新一轮由元禾原点、戈壁创投、小苗朗程投资,资金将用于技术研发投入和产品迭代、加快量产交付速度。
「千觉机器人」成立于2024年5月,专注研发面向机器人精细操作的多模态触觉感知与操作技术,核心产品包括高分辨率多模态触觉传感器、触觉感知与控制智能化模组等。创始人马道林为上海交大副教授,在触觉传感器领域,他提出了 “依靠触觉和接触来构建空间感知”的机器人操作路径,首次基于触觉实现对被抓取物体的高精度运动跟踪。
在复杂环境下,单纯依赖视觉传感的方案面临诸多挑战,受光照强度变化、物体遮挡及透视变形等因素,这些因素都可能导致其信息感知出现失真现象。对比之下,触觉方案可以有效克服上述局限,在具身智能研究中逐渐展现出独特优势。
触觉传感器能够实时感知接触力的分布与大小,并提供高精度、高时效性的反馈数据。基于这些触觉反馈,机器人灵巧手可动态调整操作策略,包括自适应调节抓取力度、优化手指姿态、调整运动轨迹等,从而提高操作的稳定性和精准度,确保任务的高效执行。
在处理柔软、易碎或形状不规则的物体时,触觉传感器使机器人能够精确感知物体的材质特性与轮廓信息。
例如,在试管搬运与操作过程中,触觉传感器可帮助机器人实时感知试管的光滑度与脆性,并监测其中液体的动态变化。在此基础上,机器人能够精准调节抓取力度,优化握持姿态,并在液体混合或转移过程中控制晃动幅度,从而降低试管破损与液体溢出的风险,确保操作的稳定性与安全性。这一能力显著提升了机器人在精细操作场景中的适应性。
在硬件端,「千觉机器人」自研多模态高精度触觉传感器G1-WS,这款传感器是专为机器人夹爪设计,可以提供多模态、高分辨率的触觉信息,信息感受密度高达人类手指的800倍,能够感知到细微的物体特征和变形,为机器人精细操作提供高精度触觉反馈。
以智元机器人AgiBot World数据采集任务为例。让机器人进行电脑主机装内存条的任务,需要其具备亚毫米级精细控制能力,以避免造成设备损坏。其中,G1-WS能够精准感知包括三维形状、三维力分布以及六维合力等多种信息,测量分辨率精度达到每平方厘米5万个测量点,X/Y方向轴精度为0.03毫米,Z方向轴精度为0.06毫米,在保证超高分辨率与精度的同时,每帧深度场的处理时间仅需10毫秒。
这相当于为机器人装置了一个“指尖神经”,可提供如神经纤维般灵敏的末端触觉,实现精准对接。
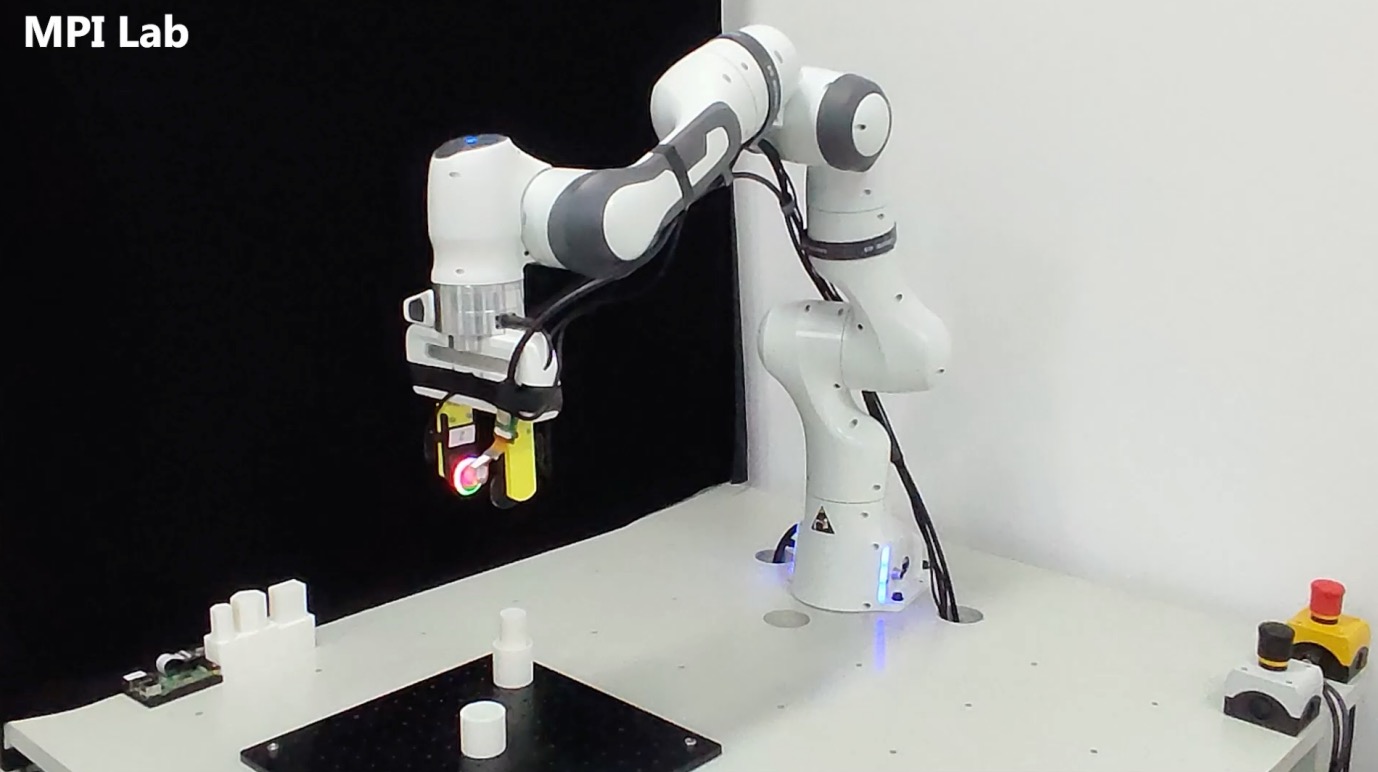
高精度触觉感知算法在机器人精细装配上测试(图源/千觉机器人)
同时,G1-WS在结构上采用楔形结构,前端更加细窄,可用于应对狭窄区域的复杂工况,前端最薄处仅5毫米。这意味着,G1-WS可以轻松进入任何人类手指能够触及的地方,提供灵活精确的感知能力,以解决复杂的装配任务和狭小空间中的精密操作。
长期以来,由于采集成本高,高质量触觉数据稀缺成为机器人触觉控制算法训练的关键瓶颈,基于仿真的合成数据是应对这一挑战的关键一环。
日前「千觉机器人」也发布全球首个触觉仿真工具Xense_Sim,能精准模拟切向运动与力信息,解决了此前切向力模拟技术空白的问题,仿真数据更贴合拧瓶盖、插拔接口等真实操作场景,有助于提升训练模型的泛化能力。
实测数据显示,Xense_Sim在效率与精度上有明显优势,在实现高精度仿真的同时,可以保持每秒50Hz的高处理速度,确保仿真精度与实时性。目前Xense_Sim已集成至Issac Sim仿真平台。
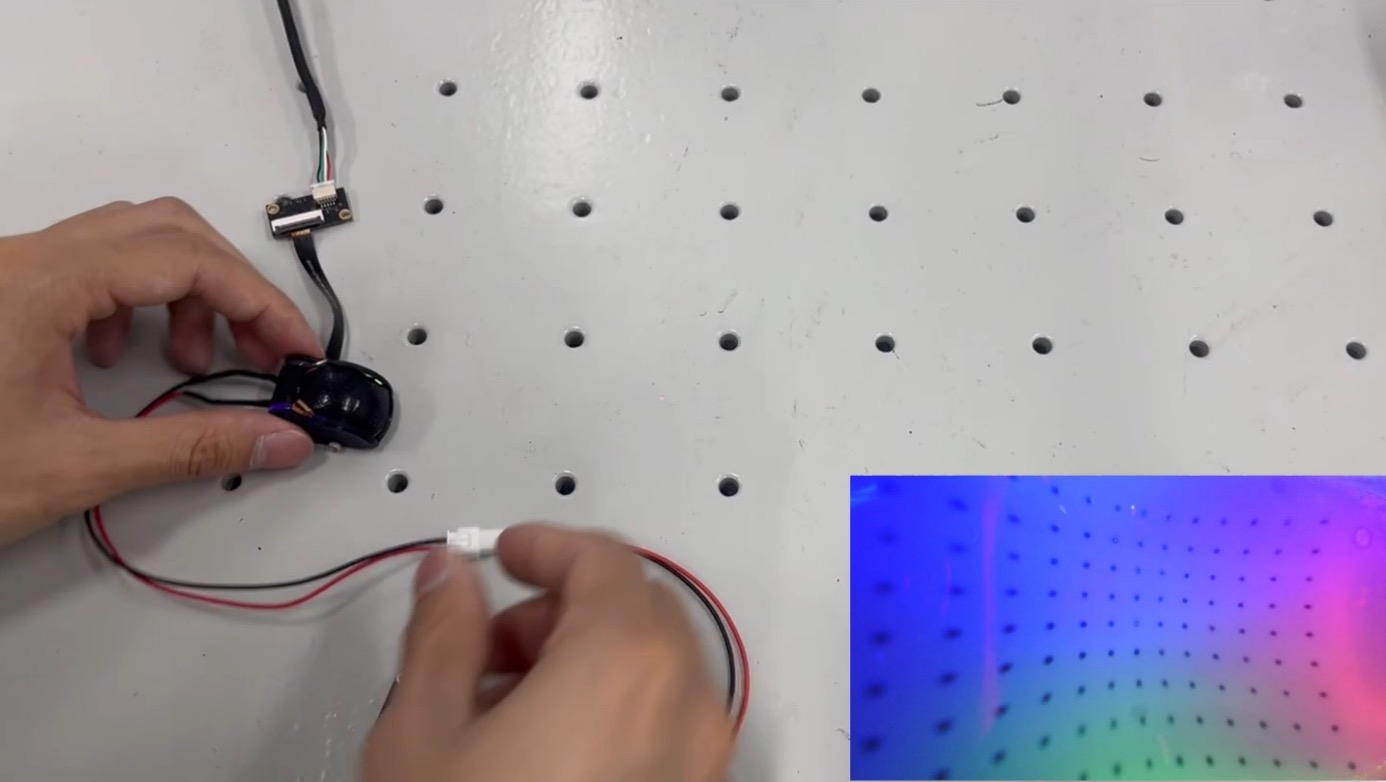
大拇指触觉传感器(图源/千觉机器人)
硬氪了解到,当前「千觉机器人」触觉仿真工具Xense_Sim及多模态高精度触觉传感器G1-WS已在智元机器人上应用,其模块化、小型化视触传感器正量产交付中,可为精密装配、工业智造及智能服务等复杂场景落地构建数据基础。
未来,双方将基于“硬件+仿真+数据”层面协同创新,共同探索机器人精细操作、复杂场景适应性及通过合成数据降低数据采集成本的新路径。




















